
Noise in the echosounder with FM or CHIRP pulse: 2nd part
For technicians and fishing captains using echosounders, noise management is crucial, as it can directly compete with the signal, affecting the accuracy of these instruments. CHIRP technology, which uses frequency-modulated (FM) pulses, has improved detection in noisy environments by offering higher resolution and better signal-to-noise ratio. However, while this technology overcomes many of the limitations of CW echosounder, it also presents challenges, such as side lobes near the seabed. This article aims to examine how FM or CHIRP pulses enhance noise mitigation compared to CW echosounder, highlighting their advantages and discussing potential drawbacks.
The importance of FM or CHIRP pulses in considering noise.
CHIRP technology has overcome the limitations of continuous wave (CW) echosounders in noise management. By emitting a pulse that covers a wide range of frequencies, CHIRP echosounders achieve higher resolution and accuracy in detecting underwater signals, significantly improving the signal-to-noise ratio (SNR) and providing clearer, more detailed images, even in noisy environments.
A conventional echosounder uses a continuous wave sound pulse, known as “Continuous Wave” or CW. In a CW pulse echosounder, noise is a critical issue to address, as it definitively and directly affects the signal, competing with it at the same level. If an echosounder emits a pulse and receives an echo with the same or less intensity than the noise, it is possible that the noise will overpower the useful signal. To properly use a CW echosounder, the noise level must be as low as possible, always below the minimum level of the signal that needs to be detected. This situation defines what is commonly known as the sensitivity of the equipment. In CW echosounders, we must increase the power so that our signal prevails over the noise, thereby improving our signal-to-noise ratio (SNR).
In frequency-modulated (FM) pulse echosounders, commonly known as CHIRP (Compressed High-Intensity Radar Pulse) echosounders, a pulse containing information across a range of frequencies is emitted. To process this information, it passes through a matching filter. To process an echo, a “seed” pulse is compared with the received echo. The “seed” represents the pulse transmitted into the water, which is used to search for and recover the received echo. The echo can be successfully retrieved even when the noise level is higher because we know in advance the pulse we sent and, therefore, what to look for and discard from what is received. For the user, much of the noise disappears on the screen, offering a generally much cleaner image than what is obtained with a continuous wave or CW pulse echosounder.
This is mainly due to the following factors:
● Higher resolution and detail: CHIRP technology emits pulses in the echosounder over a range of frequencies, unlike continuous wave echosounders. This allows for better resolution and detail in the image of the received echoes, making it easier to identify insonified objects or fish. CHIRP echosounders can more accurately discriminate between different types of targets, which is useful for distinguishing between fish, aquatic vegetation, sediments, and other elements present on the seabed.
● Greater range and depth: CHIRP echosounders typically have greater range and penetration capabilities compared to continuous wave echosounders. This allows for more effective exploration of deep waters and the detection of targets at greater distances.
● Reduced interference: CHIRP technology is less susceptible to external interference and noise, resulting in a clearer and more accurate image even under conditions of high electromagnetic interference.
The effectiveness of the CHIRP pulse in eliminating noise.
The following analysis will focus on the ability of CHIRP pulse echosounders to eliminate noise, highlighting their effectiveness compared to continuous wave (CW) technologies. It will explore how a CHIRP echosounder can mitigate “additive noise” from external sources, thereby substantially enhancing the signal-to-noise ratio (SNR).
From the perspective of its origin, noise can be considered as either “additive noise” or “reverberation.” The latter refers to the acoustic signal received from echoes produced by objects floating in the water, such as plankton or algae, while “additive noise” refers to other types of noise that we have analyzed, which are caused by various sources but not by the transmission of our own equipment. When it comes to “reverberation,” it will affect both CW and FM or CHIRP echosounders equally, as these are echoes that the matching filter will not be able to remove. On the other hand, when dealing with “additive noise,” the matching filter can successfully eliminate it, as it does not correspond to anything that can be compared to the transmitted seed pulse.
In tests comparing both technologies, the signal-to-noise ratio improvement with FM pulse over CW pulse is equivalent to increasing the power of the latter by 50 times. This increase is usually very difficult, if not impossible, to achieve in practice.
The greatest advantage of the FM or CHIRP pulse is that the duration of the ultrasound pulse can be extended without sacrificing the system’s vertical resolution. With longer pulses, the total energy transmitted into the water is exponentially greater than with a CW pulse. This significantly improves the Signal-to-Noise Ratio (SNR) without the adverse effects of resolution loss.
Adverse effects of FM or CHIRP pulse in relation to noise.
In this third and final section, we will discuss the drawbacks of using CHIRP pulse for detecting fish near the seabed, particularly focusing on the adverse effect known as side lobes. We will explore methods for addressing this issue, such as using window filters, and examine their potential impact on resolution.
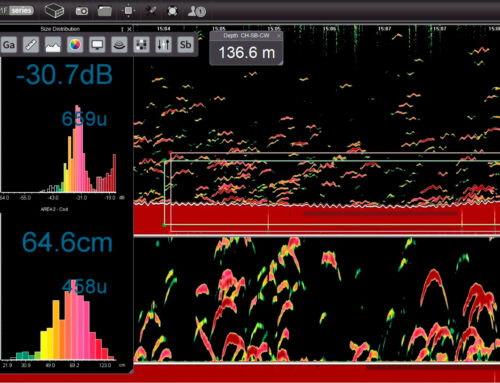
The FM or CHIRP pulse is always recommended in noisy environments, though it has some drawbacks, particularly when trying to detect fish close to the seabed. This is because of an adverse effect known as side lobes. Side lobes are an unwanted result of using the matching filter, and they are especially critical near the seabed because the seabed usually presents as a very strong echo compared to those produced by fish. All echoes can produce side lobes with FM pulse, but the seabed will generate a very noticeable effect on the echosounder screen.
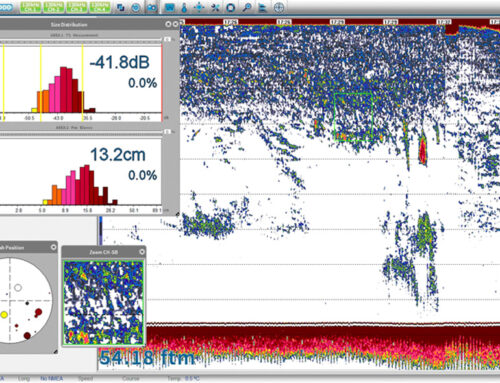
For the user, the side lobe produced by the seabed will appear as a band of noise covering the entire area above the seabed. Given the intensity of these side lobes, it is impossible to filter them out without also removing useful echoes of the same intensity level.
The Seaman FMF echosounder uses “window filters” to reduce the production of side lobes. These filters are mathematical processes applied during both transmission and reception. However, while they help reduce the impact of side lobes on the seabed, they don’t completely eliminate them and can lead to some unwanted side effects, such as a loss of vertical resolution. This means that when using a CHIRP pulse, we may not be able to detect echoes very close to the seabed unless those echoes are strong enough to surpass the applied filter.
In conclusion, the CHIRP echosounder is a superior option for reducing noise compared to a continuous wave echosounder. This is because it can spread the signal energy across a wider range of frequencies, leading to better detection of targets and a higher signal-to-noise ratio. As a result, it is more effective in variable and noisy underwater environments. However, it does have some limitations, particularly concerning unwanted effects like side lobes near the seabed. It’s important to understand all available options in order to make the best use of each specific fishing gear.
Noise in the echosounder with FM or CHIRP pulse: 2nd part
For technicians and fishing captains using echosounders, noise management is crucial, as it can directly compete with the signal, affecting the accuracy of these instruments. CHIRP technology, which uses frequency-modulated (FM) pulses, has improved detection in noisy environments by offering higher resolution and better signal-to-noise ratio. However, while this technology overcomes many of the limitations of CW echosounder, it also presents challenges, such as side lobes near the seabed. This article aims to examine how FM or CHIRP pulses enhance noise mitigation compared to CW echosounder, highlighting their advantages and discussing potential drawbacks.
The importance of FM or CHIRP pulses in considering noise.
CHIRP technology has overcome the limitations of continuous wave (CW) echosounders in noise management. By emitting a pulse that covers a wide range of frequencies, CHIRP echosounders achieve higher resolution and accuracy in detecting underwater signals, significantly improving the signal-to-noise ratio (SNR) and providing clearer, more detailed images, even in noisy environments.
A conventional echosounder uses a continuous wave sound pulse, known as “Continuous Wave” or CW. In a CW pulse echosounder, noise is a critical issue to address, as it definitively and directly affects the signal, competing with it at the same level. If an echosounder emits a pulse and receives an echo with the same or less intensity than the noise, it is possible that the noise will overpower the useful signal. To properly use a CW echosounder, the noise level must be as low as possible, always below the minimum level of the signal that needs to be detected. This situation defines what is commonly known as the sensitivity of the equipment. In CW echosounders, we must increase the power so that our signal prevails over the noise, thereby improving our signal-to-noise ratio (SNR).
In frequency-modulated (FM) pulse echosounders, commonly known as CHIRP (Compressed High-Intensity Radar Pulse) echosounders, a pulse containing information across a range of frequencies is emitted. To process this information, it passes through a matching filter. To process an echo, a “seed” pulse is compared with the received echo. The “seed” represents the pulse transmitted into the water, which is used to search for and recover the received echo. The echo can be successfully retrieved even when the noise level is higher because we know in advance the pulse we sent and, therefore, what to look for and discard from what is received. For the user, much of the noise disappears on the screen, offering a generally much cleaner image than what is obtained with a continuous wave or CW pulse echosounder.
This is mainly due to the following factors:
● Higher resolution and detail: CHIRP technology emits pulses in the echosounder over a range of frequencies, unlike continuous wave echosounders. This allows for better resolution and detail in the image of the received echoes, making it easier to identify insonified objects or fish. CHIRP echosounders can more accurately discriminate between different types of targets, which is useful for distinguishing between fish, aquatic vegetation, sediments, and other elements present on the seabed.
● Greater range and depth: CHIRP echosounders typically have greater range and penetration capabilities compared to continuous wave echosounders. This allows for more effective exploration of deep waters and the detection of targets at greater distances.
● Reduced interference: CHIRP technology is less susceptible to external interference and noise, resulting in a clearer and more accurate image even under conditions of high electromagnetic interference.
The effectiveness of the CHIRP pulse in eliminating noise.
The following analysis will focus on the ability of CHIRP pulse echosounders to eliminate noise, highlighting their effectiveness compared to continuous wave (CW) technologies. It will explore how a CHIRP echosounder can mitigate “additive noise” from external sources, thereby substantially enhancing the signal-to-noise ratio (SNR).
From the perspective of its origin, noise can be considered as either “additive noise” or “reverberation.” The latter refers to the acoustic signal received from echoes produced by objects floating in the water, such as plankton or algae, while “additive noise” refers to other types of noise that we have analyzed, which are caused by various sources but not by the transmission of our own equipment. When it comes to “reverberation,” it will affect both CW and FM or CHIRP echosounders equally, as these are echoes that the matching filter will not be able to remove. On the other hand, when dealing with “additive noise,” the matching filter can successfully eliminate it, as it does not correspond to anything that can be compared to the transmitted seed pulse.
In tests comparing both technologies, the signal-to-noise ratio improvement with FM pulse over CW pulse is equivalent to increasing the power of the latter by 50 times. This increase is usually very difficult, if not impossible, to achieve in practice.
The greatest advantage of the FM or CHIRP pulse is that the duration of the ultrasound pulse can be extended without sacrificing the system’s vertical resolution. With longer pulses, the total energy transmitted into the water is exponentially greater than with a CW pulse. This significantly improves the Signal-to-Noise Ratio (SNR) without the adverse effects of resolution loss.
Adverse effects of FM or CHIRP pulse in relation to noise.
In this third and final section, we will discuss the drawbacks of using CHIRP pulse for detecting fish near the seabed, particularly focusing on the adverse effect known as side lobes. We will explore methods for addressing this issue, such as using window filters, and examine their potential impact on resolution.
The FM or CHIRP pulse is always recommended in noisy environments, though it has some drawbacks, particularly when trying to detect fish close to the seabed. This is because of an adverse effect known as side lobes. Side lobes are an unwanted result of using the matching filter, and they are especially critical near the seabed because the seabed usually presents as a very strong echo compared to those produced by fish. All echoes can produce side lobes with FM pulse, but the seabed will generate a very noticeable effect on the echosounder screen.
For the user, the side lobe produced by the seabed will appear as a band of noise covering the entire area above the seabed. Given the intensity of these side lobes, it is impossible to filter them out without also removing useful echoes of the same intensity level.
The Seaman FMF echosounder uses “window filters” to reduce the production of side lobes. These filters are mathematical processes applied during both transmission and reception. However, while they help reduce the impact of side lobes on the seabed, they don’t completely eliminate them and can lead to some unwanted side effects, such as a loss of vertical resolution. This means that when using a CHIRP pulse, we may not be able to detect echoes very close to the seabed unless those echoes are strong enough to surpass the applied filter.
In conclusion, the CHIRP echosounder is a superior option for reducing noise compared to a continuous wave echosounder. This is because it can spread the signal energy across a wider range of frequencies, leading to better detection of targets and a higher signal-to-noise ratio. As a result, it is more effective in variable and noisy underwater environments. However, it does have some limitations, particularly concerning unwanted effects like side lobes near the seabed. It’s important to understand all available options in order to make the best use of each specific fishing gear.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}